Wildfire prevention gets real-time robotic upgrade
These Northeastern students built a sensor system that could one day identify wildfire risks in real time.


It’s only halfway through the year, and already, the U.S. has been hit by more than 30,000 wildfires, according to the National Interagency Fire Center, a federal agency that provides resources and information on wildland fires.
To assess a community’s risk, wildfire managers use a range of diagnostic methods, including “fuel moisture sampling,” in which needles, twigs, leaves and other foliage — all kindling for a wildfire — are collected and measured for their fuel moisture content.
The laborious process involves weighing the samples, cooking them in a drying oven, weighing them again, dividing those numbers by each other and multiplying them by 100 to come to their final fuel moisture content percentage, according to the U.S. Department of Agriculture. From start to finish, analysis can take around two days, and in some areas, collections are taken year-round and increase in frequency during fire season.
These tests are critical since fuel moisture levels “strongly influences fire ignition and potential,” according to the U.S. National Park Service.




Those assessment teams could one day deploy a robotics system that would make that process much simpler and faster, thanks to Northeastern graduate students James Tukpah and Ben Cometto.
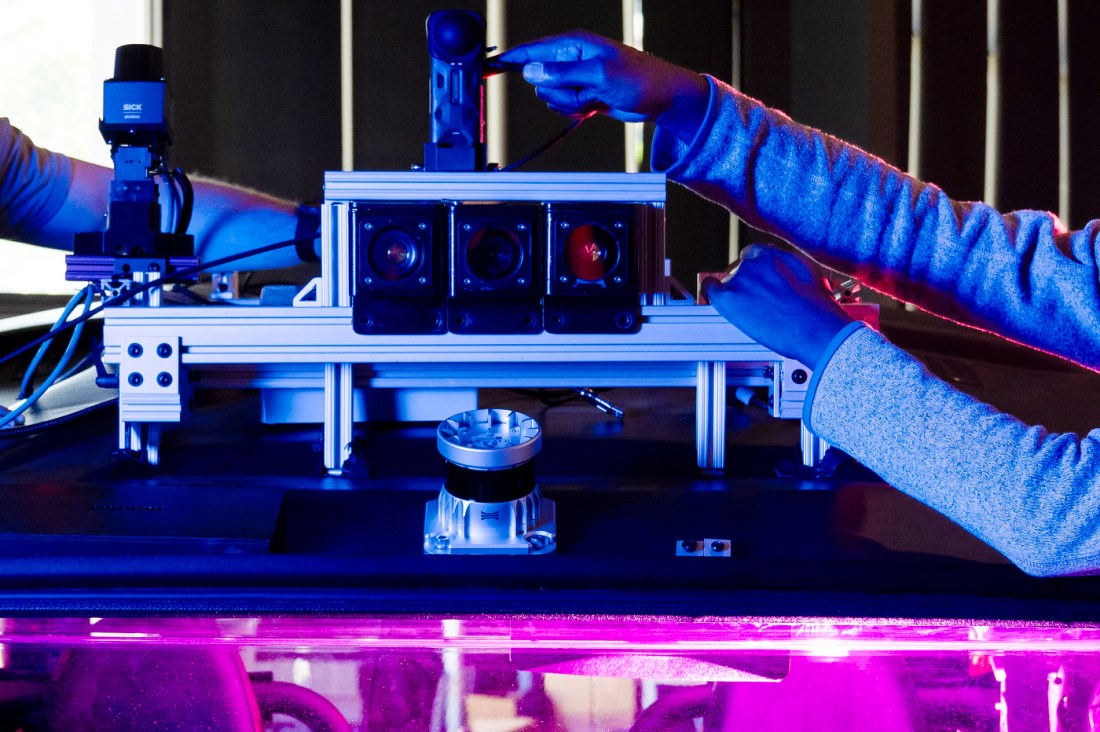
They won first place at the SICK $10K Challenge for their sensor array mount that uses Light Detection and Ranging, or lidar, and a hyperspectral camera system to digitally map and measure the fuel moisture content of vegetation and foliage that could be used as wildfire fuel.
Northeastern Global News, in your inbox.
Sign up for NGN’s daily newsletter for news, discovery and analysis from around the world.
The Huskies competed against student teams from around the U.S. and Canada in the annual collegiate robotics competition hosted by SICK Sensor Intelligence, a global sensor company that caters to the automation industry.
The Northeastern team’s sensor array is designed to be placed atop an autonomous vehicle or mobile robot and speed up the collection and analysis of samples, the pair said.
At a high level, the system’s hyperspectral camera, which captures light across continuous wavelengths, is used to classify the fuel moisture content of potential wildfire fuel, which can be anything that adds energy to a fire, including trees, dead vegetation, trash and randomly discarded items, Tukpah said.

Concurrently, the array’s lidar sensor, which emits pulses of light for mapping, pinpoints the area on a 3D point cloud, which is then displayed on a gradient map for easy viewing.
“As opposed to going through the process of walking through the forest pulling items, carrying them back [to their office] and cooking them, we can get a real-time measurement of how much fuel is present at any given point in time,” said Tukpah. “It also helps automate the process because we can do a lot of scanning continuously as opposed to sampling every couple of months.”
Using robotics to solve real-world problems is at the center of Northeastern University’s Robotics and Intelligent Vehicles Research Laboratory, where Tukpah and Cometto are students.
Tukpah said they were inspired to tackle wildfires due to the increasing frequency and the lack of automation solutions that specifically target wildfire fuel.
Editor’s Picks





The two are still testing the system out in the field using the university’s green off-road vehicle that Tukpah has spent the past few years making autonomous.
Right now, the system is capable of developing a point cloud in a forest and assigning it a specific fuel moisture data point. Actually classifying specific vegetation will likely come later, said Cometto, a master’s degree student studying robotics with a concentration in electrical and computer engineering
But the hope is that it can one day be used out in the field.
“We figured that a lot of solutions focus on fire detection and fire prevention once the fire has already started,” said Tukpah, “This gives us the opportunity to tackle wildfires from a different preventive measure.”





