Lighter, faster and more agile. Meet Northeastern’s new Mars rover
Northeastern University’s Mars Rover team will compete against 37 other teams at the University Rover Challenge next week.


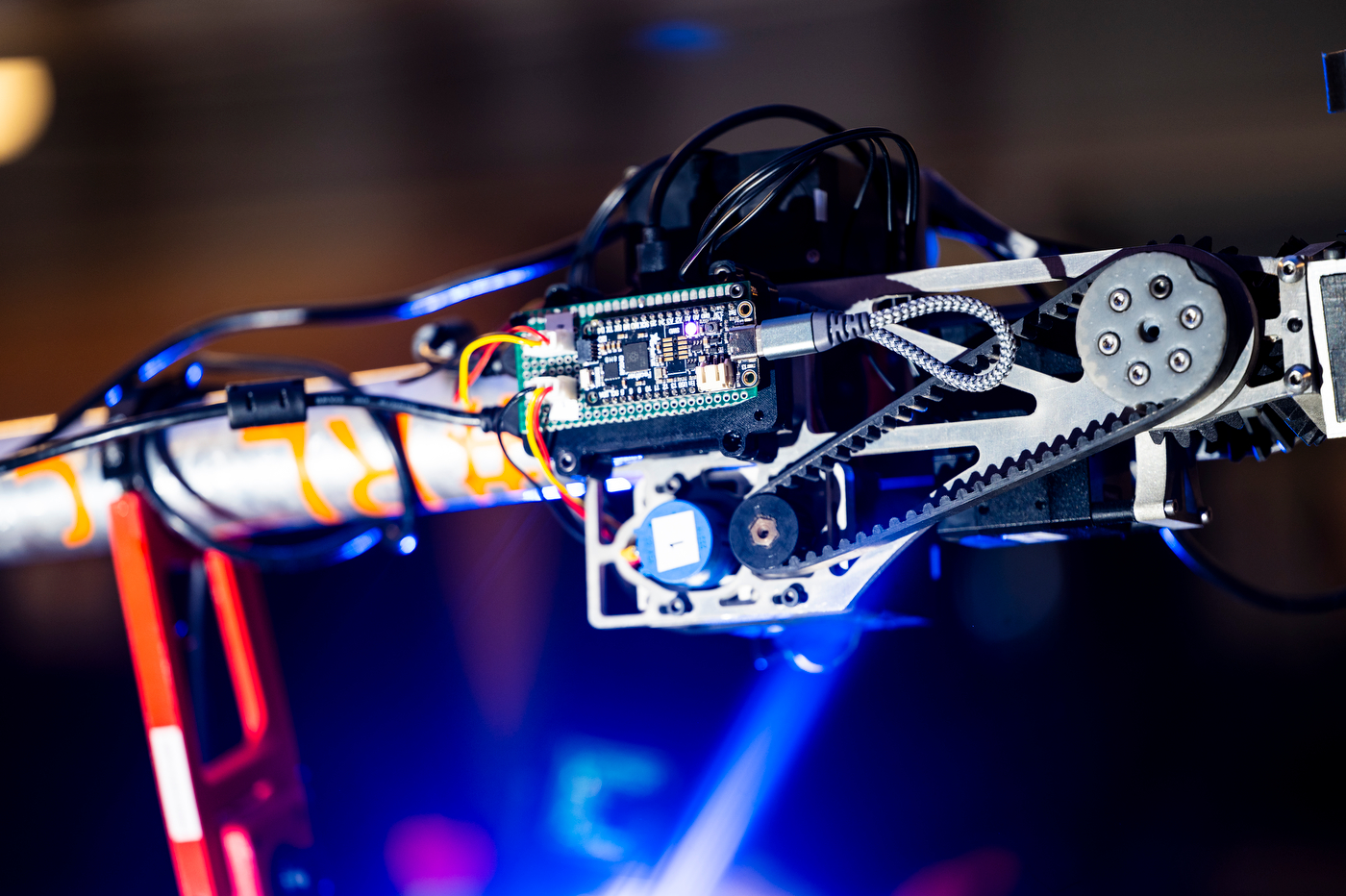
Northeastern University Mars Rover team’s new machine features an upgraded rocker suspension system, employs a refined chassis and weighs in 10% lighter with more carbon fiber.
It’s the first time the student club has rebuilt its flagship rover from scratch. Most years, they worked to refine just one or two pieces. Two years ago, the team totally transformed its robot arm. Last year, they focused on its electrical and drive system, said Noah Büttner, team lead of the rover project.
But despite last year’s strong third-place finish at the University Rover Challenge, URC, the team decided to construct a brand new rover to be even more competitive.
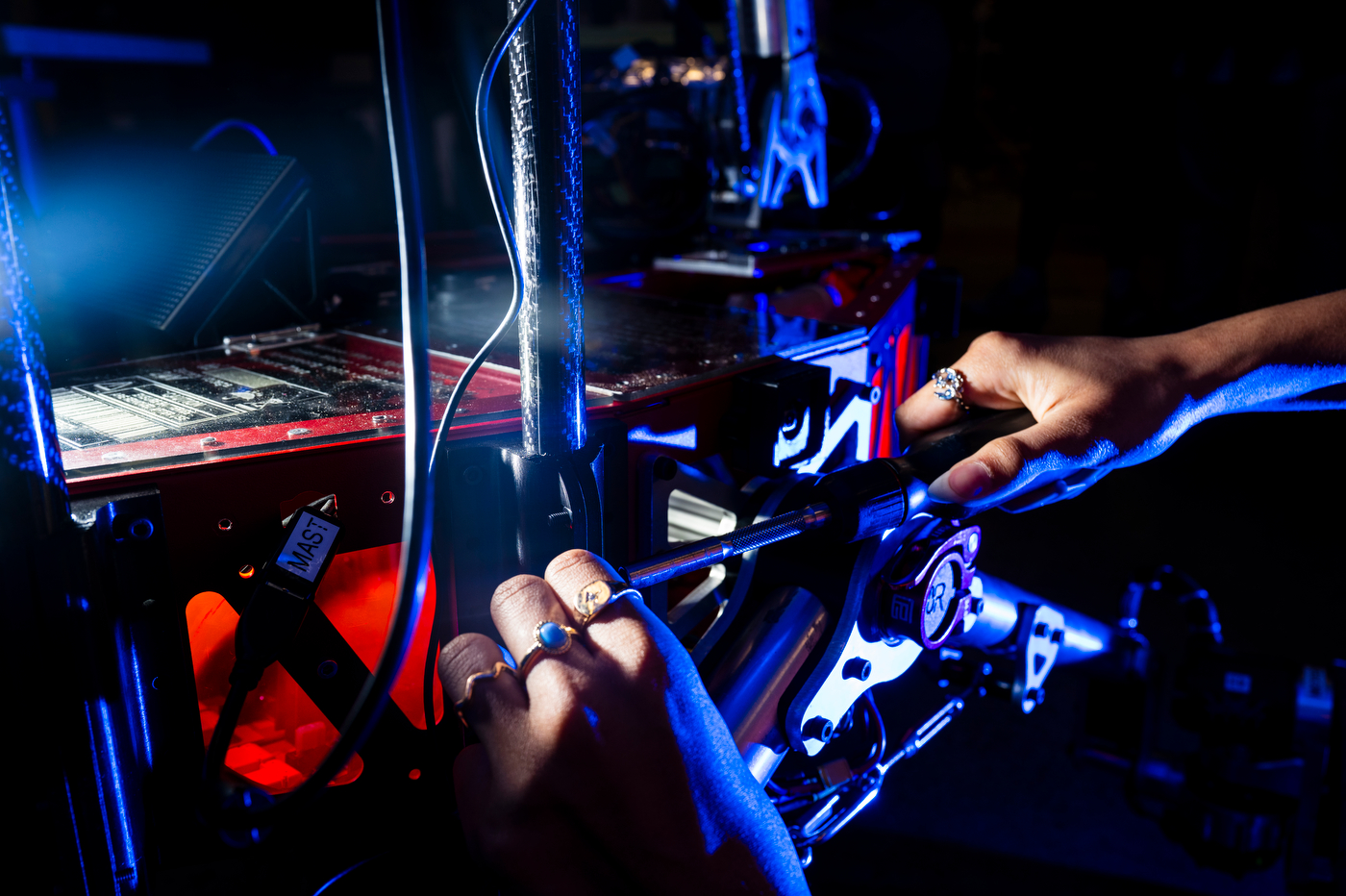
The vehicle has a new swerve drive system, which allows the robot to turn its four wheels to move side to side. The technology replaces the team’s former six-wheel “tank-style” system, which could only be driven from front to back, but not laterally. The new rig also has a revamped robot arm that has a 180-degree reversible end-of-arm tool that can pick up objects, and type on keyboards and other similar devices.


The carbon fiber upgrades on the new rover make it lighter than last year’s model, coming in at around 46 kilograms, or 101 lbs, explained Büttner, who graduated this spring with a bachelor’s degree in computer science and mathematics. He stayed on a few more weeks to help the team prepare for the competition.
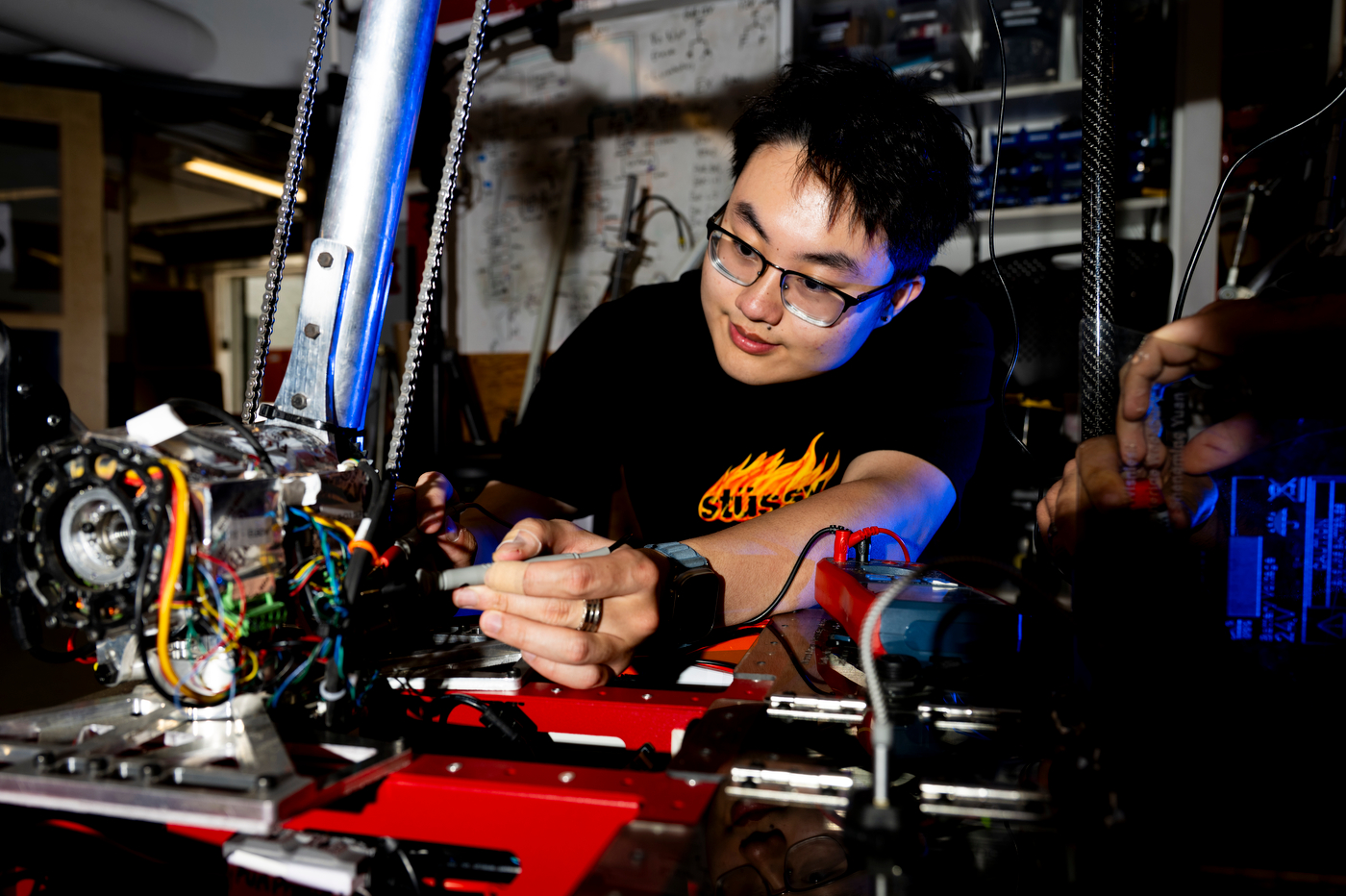
Building the new machine has been a phenomenal learning experience for new members just trying their hand at robotics systems for the first time, explained Spandana Machavarapu, an electrical co-lead of the project who also graduated this spring with a bachelor’s degree in electrical and computer engineering, but, like Büttner, is staying on for the competition.
Northeastern Global News, in your inbox.
Sign up for NGN’s daily newsletter for news, discovery and analysis from around the world.
The team is composed of a number of subgroups, each responsible for a particular part of the rover, she explained, from mechanical design to electrical soldering.
“When someone’s actually designing a part, actually designing a board, they’re able to learn so much more than if they’re just using the same rover that competes very well every single year,” she said.
All of this year’s upgrades will be useful when Northeastern competes against 37 other teams representing 11 countries next week at this year’s URC at the Mars Desert Research Center outside of Hanksville, Utah.


At the competition, the rover will be tasked with completing for four missions — a science mission, where it will have to collect soil samples; a delivery mission where it will work collaboratively with an astronaut on the field; an equipment-servicing mission where the rover will be tasked with “performing several dexterous operations to a mock lander” such as typing on keyboards and operating joysticks; and an autonomous navigation mission where its self-driving capabilities will be put to the test.
To prepare, the students have been putting the rover through simulated testing environments in their lab in the basement of Richards Hall on Northeastern’s Boston campus and by driving it around campus, particularly Cabot Quad, which is just a short distance away from their lab, explained Shaan Merchant, a rising third-year student and a member of the rover team’s electrical and software team.
To test for the equipment service mission, for example – which will require the rover to undo locks, pick up test tubes, and put items into boxes – the team 3D-printed a number of those devices.
On competition day, the team will not have direct eyesight of the rover. They’ll be controlling it from the back of a U-haul van about a kilometer away, or .6 miles, away and will only be able to see the rover’s path using its multiple camera streams.
To simulate that environment, the team tries as much as possible to view the rover’s path primarily through video streams on a laptop as it completes challenges the team has set up around Cabot.
These tests require the driver controlling the rover, the operator of the robot arm, and a third operator who controls the robot’s end of arm tool to communicate clearly with one another, he said.
“All of us are working together to coordinate how we are going to pick up the object [and] how we are going to deliver it to its final destination,” Merchant explained.
For Anthony Wang, a rising sophomore and a member of the electrical and business team, joining the Mars Rover team this past year was one of the best decisions he’s made.
Coming into Northeastern, Wang said he wanted to do something related to robotics. The Mars Rover Team caught his eye at one of the university’s club fairs.
“Every single [team] lead was very passionate about the project and [was] eager to help me learn,” he said. “Thats why I fell in love.”
Now he’s playing a leading role in helping the club secure outside sponsors to help support their competitions.
While he won’t be able to attend the competition in Utah next week, he’s excited for the other competitors to see the team’s out-of-the-box rover.
“It’s definitely a new type of robot that hasn’t really been seen,” Wang said, noting that most rovers still use a more tank style approach that just moves forwards and backwards like the team’s old one did. “This year we’re bringing in a new full drive system, so we’re ready to challenge the norms.”





