Is it possible to build a better robotic arm
Researchers at Northeastern are working to eliminate the stiff, herky-jerky motions in robotic arms to make them graceful and deft enough to gently pick up an egg or sturdy enough to stack dinner plates. The findings could one day allow doctors to remotely perform surgery on a distant battlefield or help bomb disposal experts safely remove an explosive device.
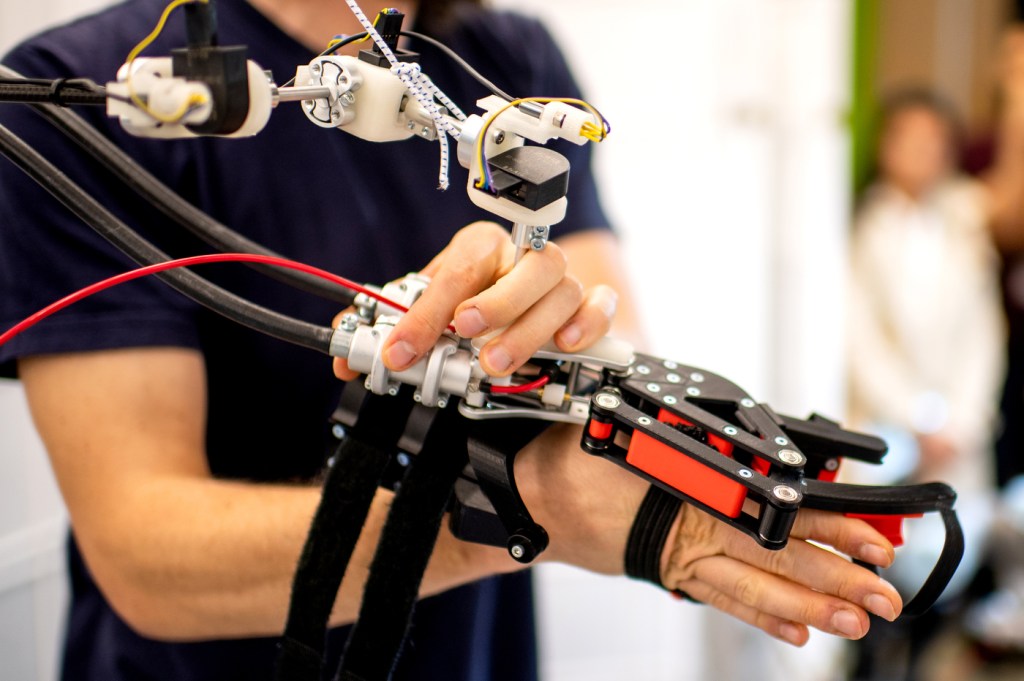
A video demonstration of a university project involving a researcher wearing a C-shaped gripping claw attached to his right hand while a nearby robotic arm mimicked his exact movements showed the promise of hydraulic technology designed to be low friction.

The researcher in the video lowered and raised his arm, swept it left and right, and bent it at the wrist, smooth actions that were copied in tandem by the robotic arm. What was not readily apparent was how the human operator was able to feel the same forces as the mechanical arm when it closed on an object, allowing the user to get a sense of textured surfaces.
The Northeastern project involves building remote-controlled robot arms that do not have heavy motors traditionally installed in the wrist joints. Instead, they are placed in the base of the machine.
“With no motors in the arm, they are much lighter than a traditional arm,” says Peter Whitney, assistant professor of mechanical and industrial engineering at Northeastern. “So now if you have a lighter arm, it’s much easier to move it around.”
The engineering advancement has the potential to overcome a fundamental obstacle humans face when controlling robots remotely—understanding the environment the machine is in.
“It’s hard to perceive exactly where the robot is, relative to the environment—whether it’s touching something or not, or how or how hard it is touching an object,” explains Whitney, whose research is focused on the design of robots, the materials they are made of, and how they are operated and controlled.
“These are all factors that can influence how we can get good performance, but also maintain safety,” he adds.

Researchers now have the ability to do machine learning with real-time information that tells how much force is being applied.
“So when we try to grasp an object or manipulate an object, we can actually make use of those contact forces, similar to how human muscles sense forces such as how heavy something is,” says Whitney.
Machine learning is an active area of research among Northeastern faculty, Whitney says. He is working with Hanu Singh, an electrical and computer engineering professor, and Robert Platt, associate professor of computer science in the Khoury College of Computer Sciences, on a National Science Foundation project involving lightweight robots that are better designed for direct, intentional contact with an object.
Whitney is also collaborating with Taskin Padir, associate professor of electrical and computer Engineering, to study the potential for robots that are controlled remotely to be used to physically interact with friends and family, serving as a mechanical stand-in. The technology could allow people to hug a loved one in quarantine as one example of its potential, Whitney says.
The project has been entered into a global competition to create an avatar system that can transport human presence to a remote location in real time. The grand prize is $10 million.
For media inquiries, please contact media@northeastern.edu.





