Electronic robot skin would expand and contract like human skin with device being developed by Northeastern researcher

Share
The next time you grab your morning coffee, observe how the palm of your hand wraps around the cup. It’s probably not something you’d normally notice, but your skin can compress to help you avoid spilling your drink.
Northeastern University researchers are exploring how to bring that versatility and tactility to robotics.
As part of a new research project supported by the National Science Foundation, Ravinder Dahiya, a professor of electrical and computer engineering at Northeastern, will explore the feasibility of bringing the robotics community one step closer to achieving that goal.
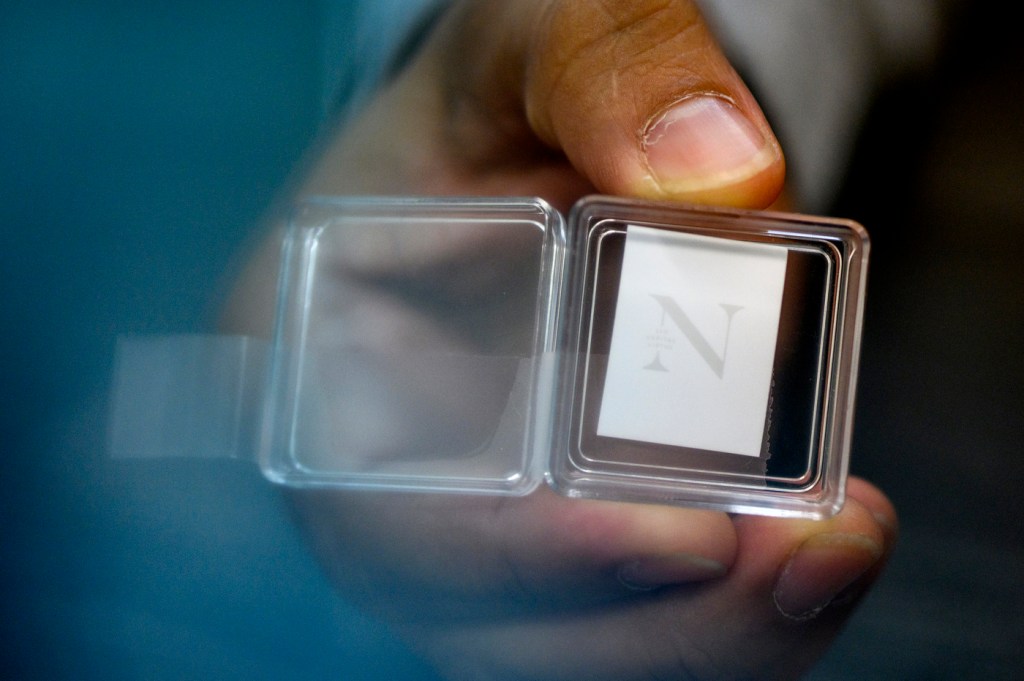
Specifically, Dahiya will work to create a device that would enable electronic skin used in robots to expand and contract similar to the way human skin does.
The device will consist of a “touch sensor integrated with a soft electromagnetic coil-based flexible ultra-thin actuator,” according to Dahiya. An actuator is a component of a device that enables its movement, he explains.
“The device is an integrated sensor and actuator,” Dahiya says. “The actuator is the part that will allow us to expand and contract the skin. That would be the new component.”
The project will start in October, and Dahiya and his team will be working in Northeastern’s new EXP building, which is opening soon on the Boston campus.
Over the span of two years, Dahiya and his team of about 20 will develop the concept device. The team will be made up of both graduate and postdoctoral students.
One of the aims of the undertaking is to “train graduate students in the interdisciplinary area of robotics, materials science, electromagnetics, sensing, and advanced manufacturing,” according to the abstract outlining the project.
Dahiya is quick to note that researchers like himself have been working on developing electronic skin for robots for almost a decade. Through their work, they developed touch sensors that enabled the skin to have a response to stimuli.
“But we noted that skin is not just about feeling. It’s also about what we call ‘haptic interaction,’ which essentially means the information goes from point of contact to the brain and then back to the point of contact,” he says. “That’s how we can explore different types of objects. That’s where the features of compressibility of skin or expansion of skin become quite important.”
Dahiya says the potential applications the device could enable are vast. In warehouses, for example, it could enhance robots’ ability to handle items of varying densities, shapes and weights, he notes.
The technology could also be used in rehabilitation settings, assisting those learning to regain function in their extremities and those who have lost limbs, he says.
“For amputees, you want to provide them with the extra flexibility to handle objects,” Dahiya says. “It’s all about moving those motors that are not always precise, so the extension of the skin will fill in the gap and will allow them to explore objects in a much better way.”
In the consumer robotics space, Dahiya says the device could enable humanoids to be able to react through stimuli in a more human-like manner.
“Although there are robots that can smile like humans, those smiles are programmed. This skin will add a new dimension to that because there will be the possibility to get touch feedback,” he says.
Dahiya says he and his team are keen to collaborate with other departments and groups on campus that are working on similar technologies. He highlights his colleagues who focus their research on materials science.
“Currently we have a bill of materials and our current simulation indicates they should work, but during the course of research we may find some materials which are better. Colleagues in material science can provide insights if we work with them,” he says.
Cesareo Contreras is a Northeastern Global News reporter. Email him at c.contreras@northeastern.edu. Follow him on Twitter @cesareo_r





