Can robots be used to
extract ice on the moon? This NASA
research fellow from Northeastern
wants to find out
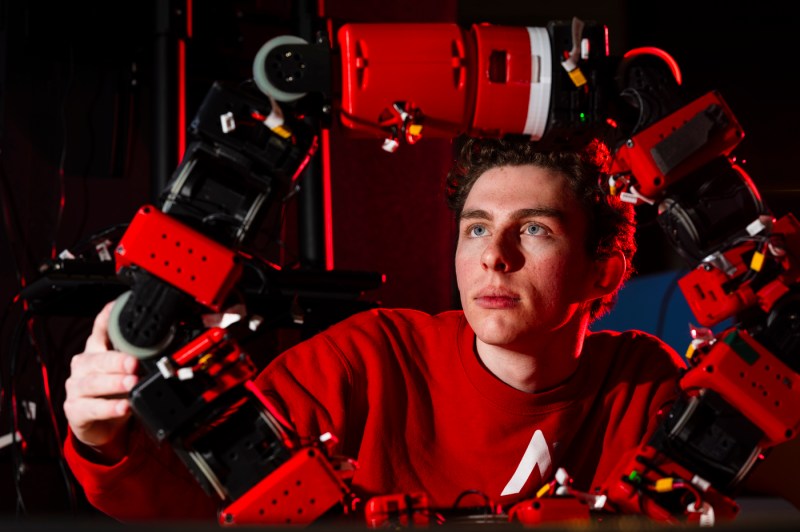
Henry Noyes plans to make the university’s snake-inspired robot fully autonomous. The recent graduate helped his team to victory in the 2022 NASA Big Idea Challenge.


Henry Noyes’ wiring work can be seen all over COBRA, Northeastern University’s award-winning serpentine robot designed to tumble down the deep craters on the moon.
As the electrical lead of the Crater Observing Bio-inspired Rolling Articulator project, Noyes designed the machine’s power system, allowing each of its individual modules to function in harmony.
Noyes, who recently graduated from Northeastern with a bachelor’s degree in mathematics and physics, played an important role in the university’s victory in the 2022 NASA Big Idea Challenge.
Led by Alireza Ramezani, Northeastern assistant professor of electrical and computer engineering, the university team was awarded the Artemis Award for COBRA’s potential to be used as part of the space agency’s missions to set up long-term lunar settlements.



Recently named a NASA space technology graduate research fellow, Noyes plans to make COBRA fully autonomous, with the hope that the machine could one day help the space agency extract ice on the moon.
As part of the two-year fellowship, Noyes will continue working as a researcher at Ramezani’s Silicon Synapse Lab on Northeastern’s Boston campus and pursue a master’s degree in robotics at the university. He will work in collaboration with doctoral student Adarsh Salagame, who helps lead the COBRA project.
Noyes will also collaborate with NASA researchers and have the opportunity to visit the space agency’s facilities throughout the country.
Unlike conventional lunar rovers, COBRA was specifically designed to transverse steep slopes. The robot’s key innovation, Noyes explains, is its form of locomotion, or the way it moves.
Like a snake in the wild, COBRA is able to shift its body back and forth in a sidewinding motion. The machine’s two end parts can also be connected to one another, allowing the robot to roll down slopes through gravity alone.

“There are craters on the moon that are massive — kilometers and kilometers of distance.They have slopes that are just too steep for regular four-wheeled rovers to get around,” Noyes said. “That’s where this robot excels — in those situations where we have to get down these massive slopes and we cannot afford to use a lot of energy, so we tumble,” he says.
For now, the robot is operated with a remote control and is not outfitted with any sensors that would enable it to be autonomous. Ideally, COBRA and cobra-inspired machines should be able to operate independently, especially if they are going to be sent into space since they aren’t expected to be brought back home, Ramezani explains.


“It’s a no-return mission,” Ramezani says. “You deploy these robots and don’t expect them to come back.”
The first step in making COBRA autonomous is outfitting the machine with a range of sensors and computer algorithms that will “allow it to localize its position with a generated map of [its] environment,” according to Noyes’ abstract of the project. From there the robot will be trained on reinforcement learning techniques and a path planning algorithm.